
![[ROS2] Nav2란?](https://img1.daumcdn.net/thumb/R750x0/?scode=mtistory2&fname=https%3A%2F%2Fblog.kakaocdn.net%2Fdn%2FxnU9v%2FbtsJvSXQjaB%2FzKJwkzPadiI2tleKVnCdp1%2Fimg.png)

Nav2란?
Nav2 (Navigation 2)는 ROS 2를 기반으로 자율 주행 로봇의 경로 계획 및 제어를 돕는 Navigation Stack입니다.
Nav2는 ROS1의 Navigation Stack을 계승 및 확장한 버전으로, ROS 2의 장점을 적극 활용하여 더 나은 성능과 유연성을 제공합니다. Nav2는 실내, 실외 환경 모두에서 사용 가능하며, 다양한 하드웨어와 센서를 지원합니다.
1. Nav2의 주요 개념
1.1 Behavior Tree
Behavior Tree (행동 트리)는 Nav2의 의사결정 프로세스를 관리하는 중요한 개념입니다. 이는 Nav2가 로봇의 행동을 유연하게 제어할 수 있도록 돕는 트리 구조입니다. Behavior Tree는 로봇이 다양한 상황에 맞춰 최적의 행동을 선택할 수 있도록 각 작업을 노드 형태로 구성합니다.
- 복구 행동이나 경로 계획 같은 작업을 나누어 처리
- 여러 작업을 병렬 또는 순차적으로 실행 가능
1.2 Planner
Planner는 로봇이 목표 지점까지 이동할 경로를 계획하는 역할을 합니다. 이때 두 가지 계획이 존재합니다:
- Global Planner: 로봇의 현재 위치에서 목적지까지의 전체적인 경로를 계산.
- Local Planner: 로봇의 주변 장애물을 실시간으로 감지하고, 로봇의 즉각적인 움직임을 계획.
Nav2는 다양한 플래너를 지원하며, 상황에 맞게 적절한 알고리즘을 선택할 수 있습니다.
1.3 Controller
Controller는 플래너가 생성한 경로를 바탕으로, 로봇이 실제로 이동할 수 있도록 제어합니다. Nav2는 PID, MPPI와 같은 다양한 제어 방식을 제공하여 로봇이 매끄럽고 정확하게 경로를 따르도록 합니다.
1.4 Costmap
Nav2의 Costmap은 로봇 주변 환경을 2D 그리드로 표현하는데 사용됩니다. Costmap은 로봇이 이동할 수 있는 안전한 영역과 장애물을 정의하는 중요한 도구입니다. 이 Costmap은 Global Costmap과 Local Costmap으로 나뉘며, 각각 넓은 영역의 경로 계획과 로봇 주변의 실시간 장애물 감지를 담당합니다.
1.5 Localization
Localization은 로봇이 환경 내에서 자신의 위치를 추정하는 과정입니다. 이는 Nav2의 필수 기능 중 하나로, AMCL(Adaptive Monte Carlo Localization)과 같은 알고리즘을 사용하여 실시간으로 위치를 추정합니다. Localization은 경로 계획이 올바르게 이루어지기 위해 중요한 역할을 합니다.
2. Nav2의 핵심 기능
2.1 경로 계획
Nav2는 글로벌 및 로컬 경로 계획을 통해 로봇이 목적지까지 효율적이고 안전하게 이동할 수 있도록 지원합니다. 다양한 경로 계획 알고리즘을 사용하여 로봇의 주행 경로를 계산하며, 실시간으로 장애물을 피할 수 있도록 지속적으로 업데이트됩니다.
2.2 복구 행동
로봇이 이동 중 장애물에 막히거나 예상치 못한 상황에 직면했을 때, Nav2는 복구 행동(Recovery Behaviors)을 통해 로봇이 다시 경로를 찾고 정상적으로 움직일 수 있도록 돕습니다. 후진, 경로 재계획 등이 대표적인 복구 행동입니다.
2.3 행동 트리 기반 제어
Behavior Tree는 Nav2에서 로봇의 다양한 행동을 관리하는 중요한 요소입니다. 상황에 맞는 행동을 순차적으로 또는 병렬로 실행할 수 있으며, 트리 구조를 통해 유연하고 확장 가능한 제어가 가능합니다.
2.4 모듈형 구조
Nav2는 각 기능이 독립적인 모듈로 구성되어 있어, 사용자는 필요에 맞게 기능을 확장하거나 수정할 수 있습니다. 또한, 다양한 하드웨어와 센서를 지원하여 로봇 시스템에 쉽게 통합할 수 있습니다.
3. Nav2를 사용하는 이유
- ROS 2 기반: Nav2는 ROS 2의 분산 처리 및 실시간 통신을 지원하여 더 나은 성능과 안정성을 제공
- 유연성: 다양한 하드웨어와 센서에 맞춰 쉽게 커스터마이징할 수 있으며, Behavior Tree와 같은 유연한 제어 구조를 제공
- 확장성: 사용자는 각 모듈을 쉽게 수정하거나 확장할 수 있어, 자신만의 자율 주행 로봇 시스템 구축 가능
- 커뮤니티 지원: Nav2는 ROS의 활발한 오픈소스 커뮤니티에서 지속적인 업데이트와 지원
4. Nav2 시스템 아키텍처
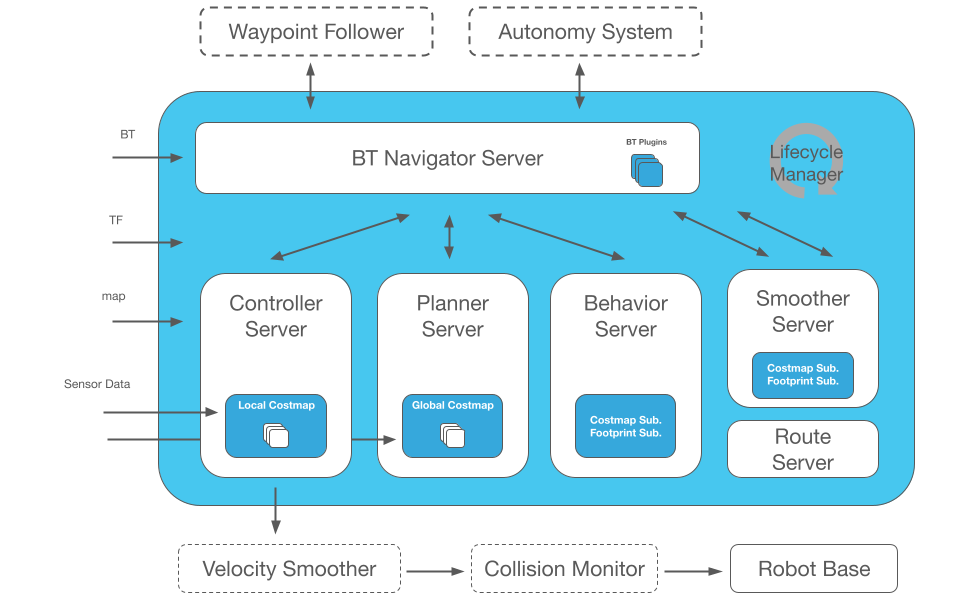
1. BT Navigator Server
- BT: Behavior Tree를 의미하며, Nav2에서 로봇의 행동을 관리하는 요소
- BT Navigator Server: Behavior Tree를 사용해 다양한 서버들과 통신하여 로봇이 목적지까지 이동할 수 있도록 전체 네비게이션 과정을 관리
- BT Plugins: 추가적인 행동을 정의하거나 확장
2. Controller Server
- Controller Server: 주로 로봇의 실시간 제어를 담당.
여기서 Local Costmap을 사용해 로봇 주변의 실시간 장애물을 인식하고, 이를 바탕으로 로봇의 속도나 방향을 제어.
3. Planner Server
- Planner Server: Global Costmap을 사용해 로봇의 시작 지점부터 목표 지점까지의 전반적인 경로를 계획.
이는 로봇이 장기적으로 어떤 경로를 따라 이동할지 결정하는 데 사용.
4. Behavior Server
- Behavior Server: 특정 상황에서 로봇이 어떻게 행동할지를 정의하는 서버. 예를 들어, 로봇이 경로를 찾지 못하거나 장애물에 막힌 경우 어떤 복구 행동을 할지 결정.
- Costmap Subscription과 Footprint Subscription을 사용하여 실시간으로 환경 정보를 받아 행동을 수정.
5. Smoother Server
- Smoother Server: 경로 계획이나 제어 과정에서 생성된 경로를 매끄럽게 수정하는 역할. 경로가 직선적이거나 각이 지지 않도록 최적화.
- 이 서버는 Costmap과 Footprint 정보를 구독하여 경로 수정 시 안전성을 유지.
6. Route Server
- Route Server: 로봇이 이동할 때 더 고차원적인 경로 데이터를 처리. 이는 복잡한 지도나 환경에서의 경로 최적화를 도움.
7. Velocity Smoother & Collision Monitor
- Velocity Smoother: 로봇의 속도를 부드럽게 조절하는 역할.
이는 경로를 따르면서 로봇이 급격하게 속도가 변하지 않도록 조정하여, 안정적인 주행을 가능하게 함. - Collision Monitor: 로봇이 장애물에 부딪히지 않도록 실시간으로 모니터링하며, 충돌을 방지.
8. Lifecycle Manager
- Lifecycle Manager: 시스템 전반의 lifecycle를 관리. 각 서버의 상태를 확인하고, 필요한 경우 시스템을 재시작하거나 설정을 재구성. 이를 통해 안정적인 시스템 동작을 보장.
'ROS2' 카테고리의 다른 글
| DDS(Data Distribution Service) 이해하기 (2) | 2025.03.17 |
|---|---|
| [ROS2] ros2 bag 명령어 사용법 (1) | 2025.01.15 |
| [ROS2] Topics, Services, Actions 차이 (0) | 2024.06.11 |
| ROS2 - mcap이란? (0) | 2024.06.10 |